Mathematical process about Deterministic Policy Gradient Algorithms.
目录
1. Policy Gradient
2. Stochastic Actor-Critic
3. Gradients of Deterministic Policies
4. Limit of the Stochastic Policy Gradient
5. Compatible Function Approximation
6. DDPG
An example of DDPG on pendulum
定义
符号
$r_{t}^{\gamma}=\displaystyle \sum_{k=t}^{\infty}\gamma^{k-t}r(s_{k},\ a_{k})$,其中$0<\gamma<1$
$V^{\pi}(s)=\mathrm{E}\left[r_{1}^{\gamma}|S_{1}=s;\pi\right]$
$Q^{\pi}(s,\ a)= \mathrm{E}\left[r_{1}^{\gamma}|S_{1}=s,\ A_{1}=a;\pi\right]$
常规条件
常规条件A.1: $p(s’|s,\ a)$ , $\nabla_{a}p(s’|s,\ a)$ , $\mu_{\theta}(s)$ , $\nabla_{\theta}\mu_{\theta}(s)$ , $r(s,\ a)$ , $\nabla_{a}r(s,\ a)$ , $p_{1}(s)$ 对任意变量 $s, a, s’$连续。
常规条件A.2: 存在 $b$ 和 $L$ 使得 $\displaystyle \sup_{s}p_{1}(s)<b,\ \displaystyle \sup_{a,s,s},\ p(s’|s,\ a)<b,\ \displaystyle \sup_{a,s}r(s,\ a)<b,\ \displaystyle \sup_{a,s,s},\ ||\nabla_{a}p(s’|s,\ a)||<L$, 并且 $\displaystyle \sup_{a,s}||\nabla_{a}r(s,\ a)||<L$。
模型性能
其中$\rho^{\pi}(s’) := \int_{\mathcal{S}}\sum_{t=1}^{\infty}\gamma^{t-1}p_{1}(s)p(s\rightarrow s’,\ t,\ \pi)\mathrm{d}s$,成为折扣状态分布。论文中假设$\mathcal{A}=\mathbb{R}^m$,$\mathcal{S}$为$\mathbb{R}^b$的一个紧子集。有界闭集就是紧集。
1. Policy Gradient
$\it Proof.$ 首先,
对$\theta$求导,
其中$p(s\rightarrow s’,\ k,\ \pi)$为在策略$\pi_\theta$下从$s$开始经过k步到底$s’$的概率。另外在 (1) 处使用了莱布尼茨变限积分求导规则。因此有,
另外在 (2) 处使用了莱布尼茨变限积分求导规则。
2. Stochastic Actor-Critic
i) $Q^{w}(s,\ a) =\nabla_{\theta}\log\pi_{\theta}(s,\ a)^{\mathrm{T}}w$ 并且 ii) 参数 $w$ 最小化了平方误差 $\epsilon^{2}(w)=\mathrm{E}_{s\sim\rho^{\pi}, a\sim\pi_{\theta}}[(Q^{w}(s,\ a)-Q^{\pi}(s,\ a))^{2}]$,下面的梯度是无偏的,
$\it Proof.$
由于$w$ 最小化了平方误差 $\epsilon^{2}(w)=\mathrm{E}_{s\sim\rho^{\pi}}, a\sim\pi_{\theta}\left[(Q^{w}(s,\ a)-Q^{\pi}(s,\ a))^{2}\right]$,故,
由于$Q^{w}(s,\ a) =\nabla_{\theta}\log\pi_{\theta}(s,\ a)^{\mathrm{T}}w$,将$\nabla_w Q^w(s,\ a)=\nabla_{\theta}\log\pi_{\theta}(s,\ a)$带入上式得到,
3. Gradients of Deterministic Policies
$\it Proof.$上面的常规条件保证了下面都是可积分和可微分的,
在 (3) 处使用了莱布尼茨变限积分求导规则。重复上面的过程得到,
在 (4) 处使用了富比尼定理交换了积分次序。接下来,
在 (5) 处使用了莱布尼茨变限积分求导规则。
4. Limit of the Stochastic Policy Gradient
条件 B1:
一个参数为 $\sigma$ 的函数 $\nu_{\sigma}$ 被称为在 $\mathcal{R}\subseteq \mathcal{A}$ 上的常规 delta近似要满足下面几个条件:
1. 分布 $\nu_{\sigma}$ 收敛于delta分布,有性质: 当 $||\nabla_{a}f(a)||<L<\infty, \displaystyle \sup_{a}f(a)<b<\infty$,$\mathcal{F}$ 为 $L$-Lipschitz 和有界函数的分类:
2. 对于任意 $a’\in \mathcal{R}, \nu_{\sigma}(a’,\ \cdot)$ 被有Lipschitz边界的 $C_{a’}\subseteq \mathcal{A}$ 支撑,并且在 $C_{a’}$ 上连续可微。
3. 对于任意 $a’\in \mathcal{R}$,$a\in \mathcal{A}$,梯度$\nabla_{a’}\nu_{\sigma}(a’,\ a)$ 存在。
4. 对于全部 $a\in \mathcal{A},\ a’\in \mathcal{R}$,$\delta\in \mathbb{R}^{n}$ 有 $a+\delta\in \mathcal{A},\ a’+\delta\in \mathcal{A},
\nu(a’,\ a)=\nu(a’+\delta,\ a+\delta)$。
定理
令 $\mu_{\theta}$ : $S\rightarrow A$,$\mu_{\theta}$ 的范围为 $\mathcal{R}_{\theta} :=\mathrm{r}\mathrm{a}\mathrm{n}\mathrm{g}\mathrm{e}(\mu_{\theta})\subseteq \mathcal{A}$,并且 $\displaystyle \mathcal{R}=\bigcup_{\theta}\mathcal{R}_{\theta}$。对于每一个 $\theta$, 随机策略 $\pi_{\mu_{\theta},\sigma}$ 表示为 $\pi_{\mu_{\theta},\sigma}(a|s)=\nu_{\sigma}(\mu_{\theta}(s),\ a)$ , $\nu_{\sigma}$ 在 $\mathcal{R}$ 满足条件 B1,则有,
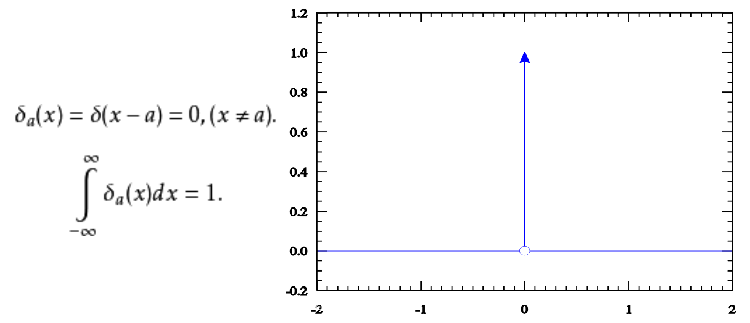
当 $\mathcal{A}=\mathbb{R}^{n}$: 时任意连续可微, 总积分为 1 ,并且紧支撑的 $\xi$ : $\mathbb{R}^{n}\rightarrow \mathbb{R}$, 能够构建出 $\nu_{\sigma}(a’,\ a)=1/\sigma^{n}\xi((a-a’)/\sigma)$,这满足条件B1。并且这样的函数范围很大:给出任意紧支撑这个函数都能构建出来。
条件1,$\int_\mathcal{A}\nu_\delta(a’,\ a) da=\int_\mathcal{A}1/\sigma^{n}\xi((a-a’)/\sigma)da=\int_\mathcal{A}\xi((a-a’)/\sigma)d((a-a’)/\sigma)=1$,当$a-a’\neq 0$,存在$\sigma>0$使得$(a-a’)/\sigma=0$,即$\lim_{\sigma\downarrow 0}(1/\sigma^{n}\xi((a-a’)/\sigma))=0$。$\lim_{\sigma\downarrow 0}\nu(a’,x)=\delta_a’(x)$。条件2,3,4显然成立。
引理1。
当 $\mathcal{U}\times \mathcal{V}\subseteq \mathbb{R}^{n}\times \mathbb{R}^{n}$,并且 $\nu$ : $\mathcal{U}\times \mathcal{V}\rightarrow \mathbb{R}$ 在 $\mathcal{U}\times \mathcal{V}$上可微分。故有 $(A)\Leftrightarrow(B)\Rightarrow(C)$,
(A) 对所有 $u\in \mathcal{U}, v\in \mathcal{V}$, $\delta\in \mathbb{R}^{n}$ 有 $u+\delta\in \mathcal{U}, v+\delta\in \mathcal{V}, \nu(u,\ v)=\nu(u+\delta,\ v+\delta)$。
(B) 存在函数 $\chi$ : $\mathbb{R}^{n}\rightarrow \mathbb{R}$ 有 $\nu(u,\ v)=\chi(u-v)$。
(C) $\nabla_{u}\nu(u,\ v)=-\nabla_{v}\nu(u,\ v)$,梯度处处存在。
另外,如果 $\mathcal{U}\times \mathcal{V}$ 是凸集,则有 $C\Rightarrow \mathrm{A}$。
引理${\it proof}$。
$\mathrm{A}\Rightarrow \mathrm{B}$:
$\mathrm{B}\Rightarrow \mathrm{A}$:
$\mathrm{B}\Rightarrow \mathrm{C}$: 令 $h(u,\ v)=u-v$ 根据链式法则,
($\mathrm{C}$ 和凸集) $\Rightarrow \mathrm{A}$: 假设 $\mathcal{U}\times \mathcal{V}$ 是凸集。对任何 $(u,\ v)\in \mathcal{U}\times \mathcal{V}$, $\delta\in \mathbb{R}^{n}$, 有,
因为 $\mathcal{U}\times \mathcal{V}$ 是凸集, 对任意 $A=(u,\ v)\in \mathcal{U}\times \mathcal{V}$ 和 $B=(u+\delta,\ v+\delta)\in \mathcal{U}\times \mathcal{V}$ 有直线连接 $A$ 和 $B$ ,这条直线式是完全包含在 $\mathcal{U}\times \mathcal{V}$中的。 因此 $\nu$ 沿着这条线就有 $\nu(A)=\nu(B)$。
引理2。
1. 对于任意 $\pi,\ t,\ \displaystyle \sup_{s}p_{t}^{\pi}(s)<b$。
2. 对于任意 $\pi, \displaystyle \sup_{s}\rho^{\pi}(s)<b/(1-\gamma)$。
3. 对于任意 $\pi, \displaystyle \sup_{a,s}||\nabla_{a}Q^{\pi}(a,\ s)||<c<\infty$。
$\it Proof$. 1. 当 $t=1$ 常规条件 A.2, 当 $t\geq 1,$
2. $\displaystyle \sup_{s}\rho^{\pi}(s)\leq\sum_{t=1}^{\infty}\gamma^{t-1}\sup_{s}p_{t}^{\pi}(s)\leq b/(1-\gamma)$
$\displaystyle \sup_{s}V^{\pi}(s)\leq\sum_{t=1}^{\infty}\gamma^{t-1}\sup_{s}r(s_{k},\ a_{k})\leq b/(1-\gamma)$
3. 有,
因为 $S$ 紧的,并且在 $S$ 上的积分时有限的。
引理3。
$\displaystyle \lim_{\sigma\downarrow 0}\rho^{\pi_{\mu_{\theta},\sigma}}(s)=\rho^{\pi_{\mu_{\theta},0}}(s)$ 并且收敛是一致收敛,
$\it Proof.$ 我们有 $\displaystyle \rho^{\pi}(s)=\sum_{t=1}^{\infty}\gamma^{t-1}p_{t}^{\pi}(s)$。显然有 $p_{1}^{\pi_{\mu_{\theta},\sigma}}(s)=p_{1}(s)=p_{1}^{\pi_{\mu_{\theta},0}}(s)$。对应 $\nu_{\sigma}$ 的定义,对应任意 $\epsilon_{1}>0$ 存在 $\sigma^{*}$ 当 $\sigma<\sigma^{*}$时,
现在假设 $t\geq 1$ 时有
则,
这里 $\displaystyle \zeta=\int 1ds<\infty$. 因为 $\epsilon_{2}(1)=0$ 有,
假设,
t+1时,
故有
对于任意 $\epsilon>0$ 可以选择一个足够大的 $T$ 使得 $\displaystyle \sum_{t=T+1}^{\infty}\gamma^{t-1}b<\epsilon/2$ 然后选择 $\sigma^{*}$ 使得 $\epsilon_{1}$ 足够小使得 $\displaystyle \sum_{t=1}^{T}\gamma^{t-1}\epsilon_{1}(b\zeta+1)^{t-1}<\epsilon/2$, 这样对应任意 $\sigma<\sigma^{*}$ 有,
引理 4.
对于所有 $s\in S,\ \theta$,当 $\sigma\rightarrow 0$ 时 $\nabla_{a}Q^{\pi_{\mu_{\theta},\sigma}}(a,\ s)\rightarrow\nabla_{a}Q^{\pi_{\mu_{\theta},0}}(a,\ s)$,并且在 $(s,\ a)$ 上一致收敛。
$Proof.$ $\displaystyle \nabla_{a}Q^{\pi}(a,\ s)=\nabla_{a}(r(s,\ a)+\gamma\int p(s’|s,\ a)V^{\pi}(s’)ds’)$ ,所以有,
这里 $\displaystyle \zeta=\int 1ds<\infty$. 对任意 $\epsilon_{1}, \epsilon_{2}$ 存在 $\sigma^{*}$ 对所有 $\sigma<\sigma^{*}$ 都有,
和
这里 $\rho_{\hat{s}}^{\pi}(s)$ 和 $\rho^{\pi}(s)$,相似,只是在 $t=1$ 时的分布是 $\displaystyle \int p(s|a,\hat{s})\pi(a|\hat{s})da$ 而不是 $p_{1}$。然后有,
其中,$\displaystyle \sup_{s}\int\rho^{\pi}(s)ds\leq\sum_{t=1}^{\infty}\gamma^{t-1}\sup_{s}\int p_{t}^{\pi}(s)ds\leq 1/(1-\gamma)$ 。最后要通过选择 $\sigma$ 就可以任意小。
证明极限要用到的定理总结:
B1条件:
引理1:
引理3:
引理4:
$\it proof$ 理论。
由于引理1中 $\nabla_{a’}\nu_{\sigma}(a’,\ a)|_{a’=\mu_{\theta}(s)}=-\nabla_{a}\nu_{\sigma}(\mu_{\theta}(s),\ a)$ . 所以有,
因为 $\nu_{\sigma}$ 在边界上消失了所以boundary terms为零。对于随机策略有,
在 (6) 按照显著收敛理论交换了积分和极线。根据引理显著函数为,
这里 $||\cdot||_{\mathrm{o}\mathrm{p}}$ 表示 operator norm, 或是最大的奇异值。
operator norm的定义: $\left|A\right|_{op}=\inf\{c\geq 0:\left|A\nu\right|\leq c\left|\nu\right|\ for\ all\ \nu\in\mathcal{V}\}$
引理4中证明了 $\nabla_{a}Q^{\pi_{\mu_{\theta},\sigma}}(s,\ a)$ 的一致收敛,对应任意 $\epsilon_{1}, \epsilon_{2}$ 存在 $\sigma^{*}$ 对应任意 $\sigma<\sigma^{*}$ 有,
所以有,
又因为有(B1),
因此,
从这里和引理3可以得到,
5. Compatible Function Approximation
近似函数 $Q^{w}(s,\ a)$ 可兼容的条件,
1. $\nabla_{a}Q^{w}(s,\ a)|_{a=\mu_{\theta}(s)}=\nabla_{\theta}\mu_{\theta}(s)^{\mathrm{T}}w$
2. $w$ 最小化了平方差 $MSE(\theta,\ w)= \mathrm{E}[\epsilon(s;\theta,\ w)^{\mathrm{T}}\epsilon(s;\theta,\ w)]$ 其中 $\epsilon(s;\theta,\ w) =\nabla_{a}Q^{w}(s,\ a)|_{a=\mu_{\theta}(s)}-\nabla_{a}Q^{\mu}(s,\ a)|_{a=\mu_{\theta}(s)}$
$\it Proof$. 如果 $w$ 最小化了 $MSE$,这时 $\epsilon^{2}$ 相对于 $w$ 的梯度必须为零。又因为条件1有 $\nabla_{w}\epsilon(s;\theta,\ w)=\nabla_{\theta}\mu_{\theta}(s)$ ,
这时取 $Q^{w}(s,\ a)= (a-\mu_{\theta}(s))^{\mathrm{T}}\nabla_{\theta}\mu_{\theta}(s)^{\mathrm{T}}w+V^{v}(s)$ 能满足条件1。在使用Sarsa或Q-learning时有 $Q^{w}(s,\ a)\approx Q^{\mu}(s,\ a)$,因为平滑函数近似 $\nabla_{a}Q^{w}(s,\ a)|_{a=\mu_{\theta}(s)}\approx \nabla_{a}Q^{\mu}(s,\ a)|_{a=\mu_{\theta}(s)}$。这样满足了条件2。
6. DDPG
改进
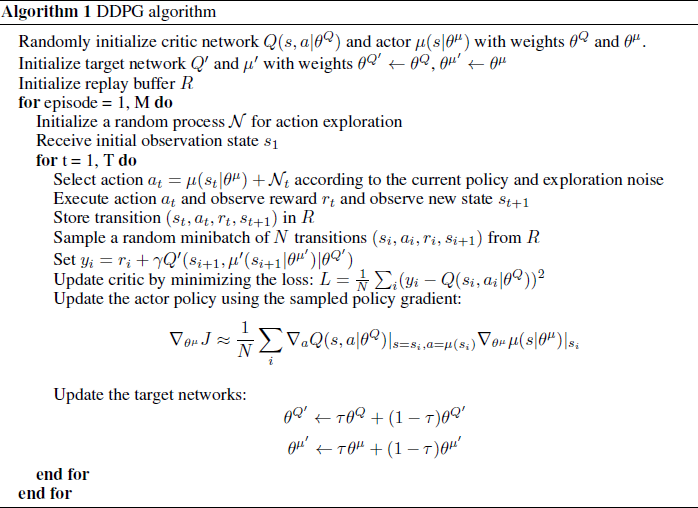
1. 样本缓存池
2. 加目标网络,延迟更新:
$\theta^{Q’}\leftarrow\tau\theta^{Q}+(1-\tau)\theta^{Q’},\\
\theta^{\mu’}\leftarrow\tau\theta^{\mu}+(1-\tau)\theta^{\mu’}$
3. 加入探索噪声:
Ornstein-Uhlenbeck process,$dx_t=\theta(\mu-x_t)dt+\sigma dW_t$。这是一个随机微分函数。
其中$\theta=1.0,\ \sigma=300,\ \mu=(0,\ 0)$初始位置在$(10,\ 10)$。
4. 状态变量尺度不同:batch normalization
5. 用像素做输入。
伪代码
实验
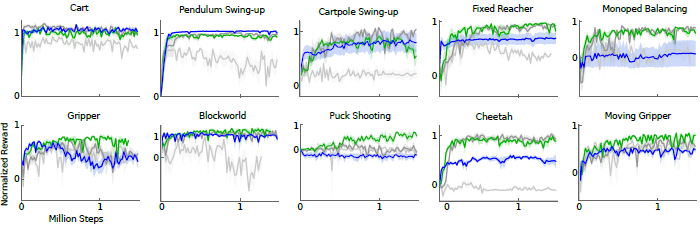
亮灰色:使用batch normalization的原始DPG。
暗灰色:有目标网络。
绿色:有目标网络和batch normalization。
蓝色:像素输入和目标网络。
Reference:
Deterministic Policy Gradient Algorithms.
Continuous control with deep reinforcement learning.